एनवीआरएएम: प्रकार, उपयोग और प्रदर्शन लाभ
एनवीआरएएम एक महत्वपूर्ण प्रकार की मेमोरी है जो बिजली बंद होने पर भी डेटा रखती है, ज...
Apr 14
दृश्य: 520
एकीकृत सर्किट (आईसीएस)
इंटरफ़ेस - सेंसर, कैपेसिटिव टचविशेष आईसीएसपीएमआईसी - वोल्टेज नियामकों - विशेष प्रयोजनपीएमआईसी - वोल्टेज नियामक - रैखिक नियामक नियंत्रकपीएमआईसी - वोल्टेज नियामकों - रैखिक + स्विचिंगपीएमआईसी - वोल्टेज नियामक - रैखिकपीएमआईसी - वोल्टेज नियामक - डीसी डीसी स्विचिंग नियामकपीएमआईसी - वोल्टेज नियामक - डीसी डीसी स्विचिंग नियंत्रकपीएमआईसी - वोल्टेज संदर्भपीएमआईसी - वी / एफ और एफ / वी कन्वर्टर्सपीएमआईसी - थर्मल मैनेजमेंटपीएमआईसी - पर्यवेक्षकपीएमआईसी - डीसी कन्वर्टर्स से आरएमएसपीएमआईसी - विद्युत आपूर्ति नियंत्रक, मॉनिटर्सपीएमआईसी - पावर ओवर इथरनेट (पोए) नियंत्रकपीएमआईसी - पावर प्रबंधन - विशेषपीएमआईसी - विद्युत वितरण स्विचेस, लोड ड्राइवरपीएमआईसी - पीएफसी (पावर फैक्टर सुधार)पीएमआईसी - या नियंत्रक, आदर्श डायोडपीएमआईसी - मोटर चालकों, नियंत्रकपीएमआईसी - प्रकाश, रोडा नियंत्रकपीएमआईसी - एलईडी ड्राइवर्सपीएमआईसी - लेजर ड्राइवर्सपीएमआईसी - हॉट स्वैप कंट्रोलर्सपीएमआईसी - गेट ड्राइवर्सपीएमआईसी - पूर्ण, आधा-पुल ड्राइवर्सपीएमआईसी - ऊर्जा मीटरिंगपीएमआईसी - डिस्प्ले ड्राइवर्सपीएमआईसी - वर्तमान नियमन / प्रबंधनपीएमआईसी - बैटरी प्रबंधनपीएमआईसी - बैटरी चार्जर्सपीएमआईसी - एसी डीसी कनवर्टर, ऑफलाइन स्विचरस्मृति - नियंत्रकस्मृति - FPGAs के लिए कॉन्फ़िगरेशन प्रोम्समेमोरी - बैटरियोंयादतर्क - यूनिवर्सल बस फ़ंक्शनतर्क - अनुवादक, स्तर शिफ्टर्सतर्क - विशेषता लॉजिकतर्क - सिग्नल स्विचेस, मल्टीप्लेक्स, डिकोडरतर्क - बदलाव रजिस्टरोंतर्क - समता जनरेटर और चेकर्सतर्क - मल्टीवीब्रेटरतर्क - लेटेसलॉजिक - गेट्स एंड इनवर्टर - मल्टी -फंक्शन, कॉन्फ़िगर करने योग्यतर्क - गेट्स और इनवर्टरतर्क - फ्लिप फ्लॉपतर्क - फीफो मेमोरीतर्क - काउंटर, डिवाइडरतर्क - तुलनात्मकतर्क - बफ़र, ड्राइवर्स, रिसीवर, ट्रांससीवररैखिक - वीडियो प्रोसेसिंगरैखिक - तुलनात्मकरैखिक - एनालॉग मल्टीप्लायर, डिवाइडररैखिक - एम्पलीफायर - वीडियो एम्प्स और मॉड्यूलरैखिक - एम्पलीफायर - विशेष प्रयोजनरैखिक - एम्पलीफायरों - इंस्ट्रूमेंटेशन, ऑप एम्प्स, बफर एम्प्सरैखिक - एम्पलीफायर - ऑडियोइंटरफ़ेस - वॉयस रिकॉर्ड और प्लेबैकइंटरफ़ेस - UARTS (यूनिवर्सल एसिंक्रोनस रिसीवर ट्रांसमीटर)इंटरफ़ेस - दूरसंचारइंटरफ़ेस - विशेषइंटरफ़ेस - सिग्नल टर्मिनेटरइंटरफ़ेस - सिग्नल बफ़र, रेपिटर, स्प्लिटरइंटरफ़ेस - सीरियलइज़र, डिसेराइलाइज़रइंटरफ़ेस - सेंसर और डिटेक्टर इंटरफेसइंटरफ़ेस - मॉड्यूलइंटरफेस - मॉडेम - आईसी और मॉड्यूलइंटरफ़ेस - I / O विस्तारकइंटरफ़ेस - फ़िल्टर - सक्रियइंटरफ़ेस - एन्कोडर्स, डीकोडर्स, कन्वर्टर्सइंटरफ़ेस - ड्राइवर्स, रिसीवर, ट्रांससीवरइंटरफ़ेस - डायरेक्ट डिजिटल सिंथेसिस (डीडीएस)इंटरफ़ेस - नियंत्रकइंटरफ़ेस - कोडईडीसीइंटरफ़ेस - एनालॉग स्विच, मल्टीप्लेक्सर्स, डेमुलप्लेक्सर्सइंटरफ़ेस - एनालॉग स्विचेस - विशेष प्रयोजनएंबेडेड - सिस्टम ऑन चिप (एसओसी)एंबेडेड - पीएलडी (प्रोग्राम लैबल डिवाइस)एंबेडेड - माइक्रोप्रोसेसरोंएंबेडेड - माइक्रोकंट्रोलर्स - आवेदन विशिष्टएंबेडेड - माइक्रोकंट्रोलर्सएंबेडेड - माइक्रोकंट्रोलर, माइक्रोप्रोसेसर, एफपीजीए मॉड्यूलएम्बेडेड - FPGAS (फील्ड प्रोग्रामेबल गेट सरणी) माइक्रोकंट्रोलर्स के साथएंबेडेड - एफपीजीए (फील्ड प्रोग्राममेबल गेट अर्रे)एंबेडेड - डीएसपी (डिजिटल सिग्नल प्रोसेसर)एंबेडेड - CPLDS (जटिल प्रोग्रामेबल लॉजिक डिवाइस)डेटा अधिग्रहण - टच स्क्रीन कंट्रोलरडाटा अधिग्रहण - डिजिटल एनालॉग कन्वर्टर्स (डीएसी)डेटा अधिग्रहण - डिजिटल पॉटटेनियोमीटरडेटा अधिग्रहण - डिजिटल कन्वर्टर्स के अनुरूप (एडीसी)डाटा अधिग्रहण - एनालॉग फ्रंट एंड (एएफई)डाटा अधिग्रहण - एडीसी / डीएसी - विशेष प्रयोजनघड़ी / समय - वास्तविक समय घड़ियोंघड़ी / समय - प्रोग्राम टाइमर और ओस्लीलेटर्सघड़ी / समय - आईसी बैटरियोंघड़ी / समय - देरी रेखाएंघड़ी/समय - घड़ी जनरेटर, पीएलएल, आवृत्ति सिंथेसाइज़रघड़ी / समय - क्लॉक बफ़र, ड्राइवर्सघड़ी / समय - आवेदन विशिष्टऑडियो विशेष प्रयोजनगर्म निर्माता
More categories
असतत सेमीकंडक्टर उत्पाद
वर्तमान विनियमन - डायोड, ट्रांजिस्टरट्रांजिस्टर - विशेष प्रयोजनट्रांजिस्टर - प्रोग्रामयोग्य युजिजक्शनट्रांजिस्टर - जेएफईटीट्रांजिस्टर - आईजीबीटी - एकलट्रांजिस्टर - आईजीबीटी - मॉड्यूलट्रांजिस्टर - आईजीबीटी - एरेट्रांजिस्टर - एफईटी, एमओएसएफईटी - सिंगलट्रांजिस्टर - एफईटी, एमओएसएफएटी - आरएफट्रांजिस्टर - एफईटी, एमओएसएफएटी - एरेज़ट्रांजिस्टर - द्विध्रुवी (BJT) - एकल, पूर्व -पक्षपातीट्रांजिस्टर - द्विध्रुवी (बीजेटी) - एकलट्रांजिस्टर - द्विध्रुवी (बीजेटी) - आरएफट्रांजिस्टर - द्विध्रुवी (BJT) - सरणियाँ, पूर्व -पक्षपातीट्रांजिस्टर - द्विध्रुवी (बीजेटी) - एरेज़थिररिस्टर्स - टीआरएआईसीथिररिस्टर्स - एससीआर - मॉड्यूलथिररिस्टर्स - एससीआरथियरिस्टर्स - डीआईएसी, एसआईडीएसीपावर चालक मॉड्यूलडायोड - जेनर - एकलडायोड - जेनर - एरेडायोड - वैरिएबल कैपेसिटन्स (वैरीकैप, वर्क्टर्स)डायोड - आरएफडायोड - रेक्टीफायर - एकलडायोड - रेक्टीफायर्स - एरेज़डायोड - ब्रिज रेक्टीफायर्सगर्म निर्माता
More categories
संधारित्र
ट्रिमर, वैरिएबल कैपेसिटरपतली फिल्म संधारित्रटैंटलम कैपेसिटरटैंटलम - पॉलिमर कैपेसिटरसिलिकॉन कैपेसिटरनाइओबियम ऑक्साइड कैपेसिटरमीका और पीटीएफई कैपेसिटरफिल्म कैपेसिटरइलेक्ट्रिक डबल लेयर कैपेसिटर (EDLC), सुपरकैपेसिटरसिरेमिक कैपेसिटरसंधारित्र नेटवर्क, सरणीएल्यूमिनियम इलेक्ट्रोलाइटिक कैपेसिटर्सएल्यूमिनियम - पॉलिमर कैपेसिटरगर्म निर्माता
More categories
सर्किट संरक्षण
टीवीएस - सर्ज प्रोटेक्शन डिवाइस (एसपीडी)टीवीएस - वाइरिस्टर्स, एमओवीटीवीएस - थियरिस्टर्सटीवीएस - मिश्रित प्रौद्योगिकीटीवीएस - डायोडथर्मल कटऑफ (थर्मल फ्यूज)सर्ज दमन आईसीएसपीटीसी रिसेट योग्य फ़्यूज़प्रकाश संरक्षणवर्तमान सीमित सीमाएं (आईसीएल)ग्राउंड फॉल्ट सर्किट इंटरप्रटर (जीएफसीआई)गैस निर्वहन ट्यूब गिरफ्तारियों (जीडीटी)फ़्यूज़Fuseholdersविद्युत, विशेषता फ़्यूज़परिपथ तोड़ने वालेगर्म निर्माता
More categories
आइसोलेटरों
विशेष उद्देश्यऑप्टोओसोलॉटर्स - ट्राएक, एससीआर आउटपुटऑप्टोओसोलॉटर्स - ट्रांजिस्टर, फोटोवोल्टिक आउटपुटOptoisolators - तर्क आउटपुटअलगाव - गेट ड्राइवर्सडिजिटल आइसोलेटर्सगर्म निर्माता
More categories
आरएफ / IF और आरएफआईडी
सब्सक्राइबर पहचान मॉड्यूल (सिम) कार्डआरएफ सर्कुलेटर और आइसोलेटरआरएफआईडी, आरएफ एक्सेस, निगरानी आईसीएसआरएफआईडी ट्रांसपोंडर, टैगआरएफआईडी रीडर मॉड्यूलRFID मूल्यांकन और विकास किट, बोर्डआरएफआईडी एंटेनाआरएफआई और ईएमआई - परिरक्षण और अवशोषित सामग्रीआरएफआई और ईएमआई - संपर्क, फ़िंगरस्टॉक और गास्केटआरएफ ट्रांसमीटरआरएफ ट्रान्सीवर मॉड्यूलआरएफ ट्रांससीवर आईसीएसआरएफ स्विचेसआरएफ शील्डआरएफ रिसीवरआरएफ रिसीवर, ट्रांसमीटर और ट्रांसीवर तैयार इकाइयाँआरएफ पावर डिवाइडर / स्प्टरआरएफ पावर नियंत्रक आईसीएसआरएफ मॉड्यूलर्सआरएफ मिक्सरआरएफ विविध आईसी और मॉड्यूलआरएफ फ्रंट एंड (एलएनए + पीए)आरएफ मूल्यांकन और विकास किट, बोर्डआरएफ दिशात्मक युग्मकआरएफ डिप्लेक्सर्सआरएफ डिटेक्टरोंआरएफ डेमोडुलेटरआरएफ एंटेनाआरएफ एम्पलीफायरर्सbalunएटेनुएटर्सगर्म निर्माता
More categories
फिल्टर
देखा फ़िल्टरआरएफ फिल्टरपावर लाइन फ़िल्टर मॉड्यूलमोनोलीथिक क्रिस्टलपेचदार फिल्टरफेराइट डिस्क और प्लेट्सफेराइट कोर - केबल्स और तारोंफेराइट मोती और चिप्सकैपेसिटर के माध्यम से फ़ीडईएमआई / आरएफआई फ़िल्टर (एलसी, आरसी नेटवर्क)डीएसएल फिल्टरसामान्य मोड चुक्ससिरेमिक फ़िल्टरगर्म निर्माता
More categories
सेंसर, ट्रांसड्यूसर
अल्ट्रासोनिक रिसीवर, ट्रांसमीटर - औद्योगिकतापमान सेंसर - थर्मोस्टैट्स - यांत्रिक - औद्योगिकतापमान सेंसर - एनालॉग और डिजिटल आउटपुट - औद्योगिकनिकटता सेंसर - औद्योगिकदबाव सेंसर, ट्रांसड्यूसर - औद्योगिकऑप्टिकल सेंसर - फोटोनिक्स - काउंटर, डिटेक्टर, एसपीसीएम (सिंगल फोटॉन काउंटिंग मॉड्यूल)ऑप्टिकल सेंसर - कैमरा मॉड्यूलचुंबकीय सेंसर - स्थिति, निकटता, गति (मॉड्यूल) - औद्योगिकबल सेंसर - औद्योगिकप्रवाह सेंसर - औद्योगिकफ्लोट, लेवल सेंसर - औद्योगिकएनकोडर - औद्योगिकरंग सेंसर - औद्योगिकटच सेंसरअल्ट्रासोनिक रिसीवर, ट्रांसमीटरतापमान संवेदक - थर्मोस्टैट्स - ठोस राज्यतापमान संवेदक - थर्मोस्टैट्स - मैकेनिकलतापमान संवेदक - थर्माकोपॉल, तापमान जांचतापमान सेंसर - रिटा (प्रतिरोध तापमान डिटेक्टर)तापमान सेंसर - पीटीसी थर्मिमिस्टर्सतापमान संवेदक - एनटीसी थर्मिमिस्टर्सतापमान सेंसर - एनालॉग और डिजिटल आउटपुटस्ट्रेन गेजेसविशिष्ट सेंसरसौर कोशिकाएंशॉक सेंसरसेंसर इंटरफ़ेस - जंक्शन ब्लॉक्ससेंसर केबल - असेंब्लीनिकटता / अधिभोग सेंसर - समाप्त इकाइयांनिकटता सेंसरदबाव सेंसर, ट्रांसड्यूसरस्थिति सेंसर - कोण, रैखिक स्थिति मापनेऑप्टिकल सेंसर - चिंतनशील - तर्क उत्पादनऑप्टिकल सेंसर - चिंतनशील - एनालॉग आउटपुटऑप्टिकल सेंसर - फोटोट्रेंसिस्टर्सऑप्टिकल सेंसर - PhotoInterrupters - स्लॉट प्रकार - ट्रांजिस्टर आउटपुटऑप्टिकल सेंसर - PhotoInterrupters - स्लॉट प्रकार - तर्क आउटपुटऑप्टिकल सेंसर - फोटोइलेक्ट्रिक, औद्योगिकऑप्टिकल सेंसर - फोटोडियोडऑप्टिकल सेंसर - फोटो डिटेक्टरों - रिमोट रिसीवरऑप्टिकल सेंसर - फोटो डिटेक्टरों - तर्क आउटपुटऑप्टिकल सेंसर - फोटो डिटेक्टरों - सीडीएस सेलऑप्टिकल सेंसर - दूरी मापनेऑप्टिकल सेंसर - परिवेश प्रकाश, आईआर, यूवी सेंसरबहुगति सेंसर - कंपनगति सेंसर - झुकाव स्विचमोशन सेंसर - ऑप्टिकलमोशन सेंसर - इनक्लिनोमीटरमोशन सेंसर - आईएमयू (इंर्टियल मापन यूनिट)मोशन सेंसर - ज्यॉस्कोस्कोपगति सेंसर - एक्सीलरमीटरमैग्नेट - सेंसर मिलान हुआमैग्नेट - बहु प्रयोजनचुंबकीय सेंसर - स्विचेस (ठोस राज्य)चुंबकीय सेंसर - स्थिति, निकटता, गति (मॉड्यूल)चुंबकीय सेंसर - रैखिक, कम्पास (आईसीएस)चुंबकीय सेंसर - कम्पास, चुंबकीय क्षेत्र (मॉड्यूल)LVDT ट्रांसड्यूसर (रैखिक चर अंतर ट्रांसफार्मर)आईआरडीए ट्रांससीवर मॉड्यूलछवि सेंसर, कैमराआर्द्रता, नमी सेंसरगैस सेंसरबल सेंसरफ्लो सेंसरफ्लोट, स्तर सेंसरइनकोडर्सधूल सेंसरवर्तमान ट्रांसड्यूसररंग सेंसरएम्पलीफायरोंगर्म निर्माता
More categories
रिले
सुरक्षा रिलेरीड रिलेज़उच्च आवृत्ति (आरएफ) रिलेसंपर्ककर्ता (ठोस राज्य)संपर्ककर्ता (इलेक्ट्रोमेकनिकल)ऑटोमोटिव रिलेज़ठोस राज्य रिलेसिग्नल रिले, 2 एएमपीएस तकरिले सॉकेटविद्युत रिले, 2 एएमपीएस से अधिकआई / ओ रिले मॉड्यूलआई / ओ रिले मॉड्यूल रैकगर्म निर्माता
More categories
ट्रान्सफ़ॉर्मर
स्विचर कनवर्टर, एसएमपीएस ट्रांसफॉर्मरविशेषता ट्रान्सफ़ॉर्मर्सपल्स ट्रांसफॉर्मर्सपावर ट्रांसफॉर्मरअलगाव ट्रांसफॉर्मर और ऑटोट्रांसफॉर्मर्स, स्टेप अप, स्टेप डाउनवर्तमान सेंस ट्रांसफॉर्मरऑडियो ट्रांसफॉर्मरगर्म निर्माता
More categories
प्रतिरोधों
होल प्रतिरोधों के माध्यम सेविशेष प्रतिरोधोंअवरोध नेटवर्क, एरेचिप रक्षक - भूतल पर्वतचेसिस पर्वत प्रतिरोधीगर्म निर्माता
More categories
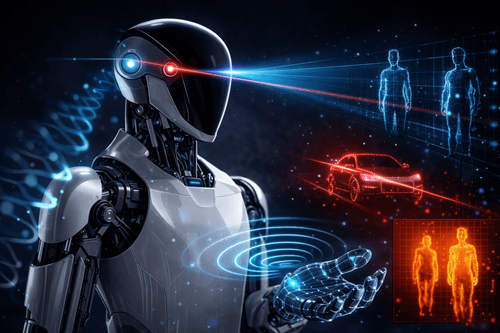
उन्नत AI वाला ह्यूमनॉइड रोबोट अभी भी खराब प्रदर्शन क्यों कर सकता है यदि इसके इलेक्ट्रॉनिक्स को कसकर समन्वित नहीं किया गया है?स्थिर गति अकेले गणना से कहीं अधिक पर निर्भर करती है।एक समकालिक बंद-लूप प्रणाली के रूप में काम करने के लिए इसे सेंसिंग, नियंत्रण, मोटर ड्राइविंग, संचार और सिग्नल-चेन सर्किट की आवश्यकता होती है।यह लेख बताता है कि टेस्ला ऑप्टिमस जैसे रोबोट के अंदर ये परतें एक साथ कैसे काम करती हैं और वे संतुलन, प्रतिक्रिया और सटीकता को कैसे प्रभावित करती हैं।
चित्र 1. एक आधुनिक रोबोट वास्तव में कैसे काम करता है
रोबोट के सभी हिस्से एक ही प्रणाली के रूप में कैसे कार्य करते हैं?व्यावहारिक रोबोटिक डिज़ाइन में, समग्र प्रदर्शन न केवल व्यक्तिगत घटकों पर निर्भर करता है, बल्कि इस बात पर भी निर्भर करता है कि वे एक साथ कितने प्रभावी ढंग से काम करते हैं।
जब टेस्ला ऑप्टिमस जैसा ह्यूमनॉइड रोबोट चलता है, तो उसकी गति केवल एआई द्वारा संचालित नहीं होती है।इसमें नियंत्रण एल्गोरिदम, एम्बेडेड सिस्टम और हार्डवेयर घटकों के बीच समन्वित बातचीत शामिल है।प्रत्येक गति एक संरचित इलेक्ट्रॉनिक आर्किटेक्चर द्वारा समर्थित होती है जो सेंसर, नियंत्रक, मोटर ड्राइवर और संचार इंटरफेस को जोड़ती है।इस स्तरित डिज़ाइन का व्यापक रूप से औद्योगिक रोबोट और उन्नत स्वचालन प्रणाली दोनों में उपयोग किया जाता है क्योंकि यह समय के साथ स्थिर और पूर्वानुमानित संचालन प्रदान करता है।
चित्र 2. समन्वित संरचना में चलने वाले ह्यूमनॉइड रोबोट
यह प्रणाली कैसे बनाई जाती है, इसे बेहतर ढंग से समझने के लिए, निम्नलिखित अनुभाग नियंत्रण, गति, संवेदन, संचार और सिग्नल प्रोसेसिंग सहित प्रत्येक परत की विस्तार से जांच करेंगे।
इससे कोई फर्क नहीं पड़ता कि सेंसर या मोटर कितने अच्छे हैं, रोबोट का प्रदर्शन अभी भी इस बात पर निर्भर करता है कि नियंत्रण इकाई कितनी तेज़ी से डेटा संसाधित कर सकती है और वास्तविक समय में प्रतिक्रिया दे सकती है।टेस्ला ऑप्टिमस जैसे रोबोट में, नियंत्रण परत निर्णय केंद्र के रूप में कार्य करती है, लगातार इनपुट पढ़ती है, नियंत्रण एल्गोरिदम चलाती है, और मिलीसेकंड के भीतर गति आदेशों को अपडेट करती है।
ह्यूमनॉइड रोबोटिक्स में, संतुलन और समन्वय बनाए रखने के लिए नियंत्रण लूप को बहुत कम समय की खिड़कियों के भीतर चलना चाहिए।जब एक रोबोट एक कदम के बाद अपनी मुद्रा समायोजित करता है, तो नियंत्रक को सेंसर डेटा को संसाधित करना होगा और मोटर कमांड को लगभग तुरंत अपडेट करना होगा।यहां तक कि थोड़ी सी देरी भी अस्थिरता, खराब समन्वय या धीमी प्रतिक्रिया का कारण बन सकती है, खासकर बहु-संयुक्त प्रणालियों में, यही कारण है कि वास्तविक रोबोटिक डिजाइनों में कम-विलंबता प्रसंस्करण की आवश्यकता होती है।
चित्र 3. एमसीयू एक रोबोट के मस्तिष्क के रूप में
प्रवेश स्तर पर, STMicroelectronics
STM32F103C8T6
सरल रोबोटिक सिस्टम और सेंसर नोड्स, एक्चुएटर नियंत्रण और बुनियादी मोटर-ड्राइविंग कार्यों जैसे कॉम्पैक्ट एम्बेडेड अनुप्रयोगों के लिए एक व्यावहारिक विकल्प है।इसमें 72 मेगाहर्ट्ज तक चलने वाला 32-बिट आर्म कॉर्टेक्स-एम3 कोर, 64 केबी फ्लैश, 20 केबी एसआरएएम, पीडब्लूएम आउटपुट, 12-बिट एडीसी और यूएसएआरटी, एसपीआई और आई2सी जैसे मानक संचार इंटरफेस की सुविधा है।ये क्षमताएं प्रदर्शन, परिधीय एकीकरण और लागत दक्षता का अच्छा संतुलन प्रदान करती हैं।
 STM32F103C8T6
STMicroelectronics
IC MCU 32BIT 64KB FLASH 48LQFP
In Stock: 35200 pcs
STM32F103C8T6
STMicroelectronics
IC MCU 32BIT 64KB FLASH 48LQFP
In Stock: 35200 pcs
जैसे-जैसे सिस्टम जटिलता बढ़ती है, STMicroelectronics
STM32F407VGT6
जैसे अधिक सक्षम नियंत्रक बेहतर फिट हो जाते हैं।यह एमसीयू 168 मेगाहर्ट्ज तक चलने वाले 32-बिट आर्म कॉर्टेक्स-एम4 कोर पर आधारित है और इसमें 1 एमबी फ्लैश और 192 केबी एसआरएएम के साथ-साथ मल्टीपल टाइमर, हाई-स्पीड एडीसी और डीएसपी निर्देश जैसे उन्नत बाह्य उपकरण शामिल हैं।ये सुविधाएँ इसे एक साथ कई इनपुट को संसाधित करने की अनुमति देती हैं - जैसे कि IMU डेटा, एनकोडर फीडबैक और संचार सिग्नल - प्रदर्शन में गिरावट के बिना।व्यावहारिक रोबोटिक प्रणालियों में, यह नियंत्रण लूप समय में सुधार करता है, विलंबता को कम करता है, और कई जोड़ों में चिकनी, अधिक सिंक्रनाइज़ गति को सक्षम बनाता है।
 STM32F407VGT6
STMicroelectronics
IC MCU 32BIT 1MB FLASH 100LQFP
In Stock: 17180 pcs
STM32F407VGT6
STMicroelectronics
IC MCU 32BIT 1MB FLASH 100LQFP
In Stock: 17180 pcs
उन्नत ह्यूमनॉइड रोबोट या उच्च-प्रदर्शन अनुप्रयोगों के लिए, NXP सेमीकंडक्टर्स
LPC55S69JBD100K
जैसे नियंत्रकों पर भी विचार किया जा सकता है।यह डिवाइस डुअल-कोर प्रोसेसिंग और उन्नत सुरक्षा और परिधीय सुविधाएँ प्रदान करता है, जो इसे जटिल, मल्टी-टास्किंग नियंत्रण वातावरण के लिए उपयुक्त बनाता है।
 LPC55S69JBD100K
NXP USA Inc.
IC MCU 32BIT 640KB FLSH 100HLQFP
In Stock: 125060 pcs
LPC55S69JBD100K
NXP USA Inc.
IC MCU 32BIT 640KB FLSH 100HLQFP
In Stock: 125060 pcs
MCU प्रभावित करता है कि ऑपरेशन के दौरान रोबोट कैसा व्यवहार करेगा।धीमी या कम शक्ति वाली एमसीयू के परिणामस्वरूप प्रतिक्रिया में देरी, अस्थिर गति या खराब समन्वय हो सकता है।दूसरी ओर, एक सुमेलित नियंत्रक यह सुनिश्चित करता है कि बदलती परिस्थितियों में भी प्रत्येक गतिविधि की गणना और कार्यान्वयन सुचारू रूप से किया जाए।यही कारण है कि रोबोटिक्स इंजीनियरिंग में नियंत्रक चयन को एक महत्वपूर्ण डिज़ाइन निर्णय माना जाता है।
व्यावहारिक डिज़ाइन में, इंजीनियर शायद ही कभी पूरे रोबोट के लिए एक ही नियंत्रक पर भरोसा करते हैं।इसके बजाय, वे एक स्तरित नियंत्रण दृष्टिकोण का उपयोग करते हैं, जहां सरल एमसीयू स्थानीय कार्यों (जैसे व्यक्तिगत मोटर्स या सेंसर समूह) को संभालते हैं, जबकि अधिक शक्तिशाली नियंत्रक उच्च-स्तरीय निर्णयों का प्रबंधन करते हैं।
यदि नियंत्रण परत "मस्तिष्क" है, तो यह वह परत है जहां निर्णय वास्तविक गति बन जाते हैं।
लेकिन सवाल यह है कि क्या रोबोट सुचारू रूप से चलेगा, या हिल जाएगा, पिछड़ जाएगा या सटीकता खो देगा?टेस्ला ऑप्टिमस जैसे रोबोट में, प्रत्येक गतिविधि इस बात पर निर्भर करती है कि मोटर नियंत्रण प्रणाली डिजिटल कमांड को नियंत्रित विद्युत शक्ति में कैसे परिवर्तित करती है।यह केवल मोटरों को चालू और बंद करने के बारे में नहीं है।यह सटीक वर्तमान नियंत्रण, समय सटीकता और सुचारू बदलाव के बारे में है, खासकर उन प्रणालियों में जहां एक ही समय में कई जोड़ काम करते हैं।
चित्र 4. सटीक रोबोट गति के लिए मोटर ड्राइवर आईसी
कई मध्य-श्रेणी के रोबोटिक सिस्टम के लिए, एलेग्रो माइक्रोसिस्टम्स
A4988SETTR-T
सबसे व्यापक रूप से उपयोग किए जाने वाले समाधानों में से एक है।इसे स्टेपर मोटर्स के लिए डिज़ाइन किया गया है और यह मोटर कॉइल के माध्यम से सरल चरण और दिशा संकेतों को नियंत्रित धारा में परिवर्तित करता है।यह ड्राइवर 1/16 चरण रिज़ॉल्यूशन तक माइक्रोस्टेपिंग का समर्थन करता है और 8 वी से 35 वी तक मोटर आपूर्ति वोल्टेज के साथ संचालित होता है, उचित शीतलन के साथ प्रति कॉइल लगभग 2 ए तक वितरित करता है।ये सुविधाएँ सुचारू गति और कम कंपन की अनुमति देती हैं, यही कारण है कि इसका उपयोग आमतौर पर 3डी प्रिंटर, सीएनसी मशीनों और बुनियादी रोबोटिक प्लेटफार्मों में किया जाता है।
 A4988SETTR-T
Allegro MicroSystems
IC MTR DRVR BIPOLAR 3-5.5V 28QFN
In Stock: 96300 pcs
A4988SETTR-T
Allegro MicroSystems
IC MTR DRVR BIPOLAR 3-5.5V 28QFN
In Stock: 96300 pcs
जैसे-जैसे रोबोटिक सिस्टम अधिक उन्नत और कॉम्पैक्ट होते जाते हैं, Infineon Technologies TLE9879 जैसे एकीकृत समाधान अधिक दक्षता प्रदान करते हैं।यह डिवाइस एक चिप में मोटर ड्राइवर के साथ एक माइक्रोकंट्रोलर (40 मेगाहर्ट्ज तक चलने वाला आर्म कॉर्टेक्स-एम 3 कोर) को एकीकृत पावर प्रबंधन और लिन जैसे संचार इंटरफेस के साथ जोड़ता है।यह विशेष रूप से ब्रश किए गए डीसी मोटर्स को चलाने के लिए डिज़ाइन किया गया है और ऑटोमोटिव-ग्रेड विश्वसनीयता का समर्थन करता है।नियंत्रण और पावर चरणों को एकीकृत करके, यह बाहरी घटकों को कम करता है, सिग्नल पथ को छोटा करता है, और समग्र सिस्टम दक्षता में सुधार करता है।इसके परिणामस्वरूप सरल पीसीबी डिज़ाइन, तेज़ प्रतिक्रिया और बेहतर विश्वसनीयता प्राप्त होती है, विशेष रूप से अंतरिक्ष-बाधित रोबोटिक मॉड्यूल या वितरित नियंत्रण प्रणालियों में।अन्य घटक, जैसे टेक्सास इंस्ट्रूमेंट्स
PCA9538PW
, भी I/O क्षमताओं का विस्तार करके सहायक भूमिका निभाते हैं।
 PCA9538PW
NXP
IC I/O EXPANDER I2C 8B 16TSSOP
In Stock: 47995 pcs
PCA9538PW
NXP
IC I/O EXPANDER I2C 8B 16TSSOP
In Stock: 47995 pcs
व्यावहारिक रोबोटिक प्रणालियों में, इसे जोड़ा जा सकता है: सरल अक्षों के लिए A4988 जैसे स्टेपर ड्राइवर, और कॉम्पैक्ट या उच्च दक्षता वाले डिज़ाइनों के लिए TLE9879 जैसे एकीकृत उपकरण।यह संतुलित दृष्टिकोण सुनिश्चित करता है कि औद्योगिक रोबोट का प्रत्येक भाग प्रदर्शन और डिज़ाइन सादगी का सही मिश्रण प्राप्त करता है।
ह्यूमनॉइड रोबोट कैसे समझ सकता है कि उसके आसपास क्या हो रहा है?धारणा परत वह जगह है जहां यह क्षमता शुरू होती है।यह गति, झुकाव, कंपन और अभिविन्यास जैसे भौतिक डेटा एकत्र करने के लिए जिम्मेदार है, फिर इसे विद्युत संकेतों में परिवर्तित करता है जिसे नियंत्रण प्रणाली समझ सकती है।
आधुनिक रोबोटों में संवेदन वैकल्पिक नहीं है - यह निरंतर है।प्रत्येक कदम, घुमाव, या अचानक गति का तुरंत पता लगाया जाना चाहिए।यदि कोई रोबोट गति में छोटे बदलावों को महसूस नहीं कर पाता है, तो वह संतुलन खो सकता है, गलत हरकतें कर सकता है, या सटीक कार्यों में विफल हो सकता है।क्या इस रोबोट में तेज़ और विश्वसनीय गति संवेदन है?एक मजबूत धारणा परत सुनिश्चित करती है कि रोबोट वास्तविक समय में खुद को सही कर सकता है, जिससे संचालन सुचारू और सुरक्षित हो जाता है।
एनालॉग डिवाइस
ADXL345BCCZ-RL7
एक्सेलेरोमीटर जैसे मोशन सेंसर व्यापक रूप से रोबोटिक धारणा प्रणालियों में उपयोग किए जाते हैं।यह 3-अक्ष डिजिटल एक्सेलेरोमीटर ±2 ग्राम, ±4 ग्राम, ±8 ग्राम और ±16 ग्राम की चयन योग्य माप रेंज प्रदान करता है, साथ ही उच्च रिज़ॉल्यूशन (13-बिट तक) और माप मोड में 23 μA जितनी कम बिजली की खपत प्रदान करता है।यह I2C या SPI इंटरफेस के माध्यम से संचार करता है और इसमें टैप डिटेक्शन, फ्री-फ़ॉल सेंसिंग और गतिविधि/निष्क्रियता निगरानी जैसी अंतर्निहित सुविधाएं शामिल हैं।ये क्षमताएं रोबोट को अच्छी सटीकता के साथ कंपन, झुकाव और अचानक गति का पता लगाने की अनुमति देती हैं, जिससे यह मुद्रा बनाए रखने, गति को स्थिर करने और यांत्रिक तनाव को रोकने के लिए उपयुक्त हो जाता है।रोबोटिक हथियार या मोबाइल रोबोट जैसी प्रणालियों में, अंशांकन डेटा को सटीक और विश्वसनीय रखने में मदद करता है, जो स्थिर नियंत्रण के लिए महत्वपूर्ण है।
 ADXL345BCCZ-RL7
Analog Devices Inc.
ACCEL 2-16G I2C/SPI 14LGA
In Stock: 41176 pcs
ADXL345BCCZ-RL7
Analog Devices Inc.
ACCEL 2-16G I2C/SPI 14LGA
In Stock: 41176 pcs
चित्र 5. एक ह्यूमनॉइड रोबोट वास्तविक समय में अपने पर्यावरण को सेंसिंग और स्कैन कर रहा है
लेकिन यदि आपको अधिक उन्नत मॉड्यूल की आवश्यकता है, तो STMicroelectronics LSM6DSOX जैसे संयुक्त सेंसर उच्च स्तर का एकीकरण और प्रदर्शन प्रदान करते हैं।यह डिवाइस एक एकल पैकेज में 3-अक्ष एक्सेलेरोमीटर और 3-अक्ष जाइरोस्कोप को एकीकृत करता है, जो ±16 ग्राम तक एक्सेलेरोमीटर रेंज और ±2000 डीपीएस तक जाइरोस्कोप रेंज का समर्थन करता है।इसमें एक एम्बेडेड मशीन लर्निंग कोर (एमएलसी) और परिमित राज्य मशीन (एफएसएम) भी शामिल है, जो सीधे सेंसर पर बुनियादी एज प्रोसेसिंग को सक्षम बनाता है।उच्च आउटपुट डेटा दर (कई किलोहर्ट्ज़ तक) और कम विलंबता के साथ, यह टाइट सिंक्रोनाइज़ेशन के साथ रैखिक गति और घूर्णी गति की एक साथ ट्रैकिंग की अनुमति देता है।यह इसे ह्यूमनॉइड रोबोट, ड्रोन और मल्टी-एक्सिस मोशन सिस्टम जैसे संतुलन, समन्वय और वास्तविक समय प्रतिक्रिया की आवश्यकता वाले अनुप्रयोगों के लिए आदर्श बनाता है।
उच्च-प्रदर्शन या तेज़-प्रतिक्रिया वाले वातावरण में, गति निर्णायक कारक बन जाती है।यहीं पर TDK InvenSense
ICM-20602
जैसे सेंसर सामने आते हैं।यह आईसी क्या प्रदान कर सकता है?यह कम विलंबता, उच्च गति गति ट्रैकिंग प्रदान करता है, जिससे रोबोट परिवर्तनों पर लगभग तुरंत प्रतिक्रिया कर सकता है।
 ICM-20602
TDK InvenSense
IMU ACCEL/GYRO/TEMP I2C/SPI LGA
In Stock: 20300 pcs
ICM-20602
TDK InvenSense
IMU ACCEL/GYRO/TEMP I2C/SPI LGA
In Stock: 20300 pcs
लेकिन क्या रोबोट बदलती परिस्थितियों में स्थिरता बनाए रख सकता है?यह इस बात पर निर्भर करता है कि धारणा परत नियंत्रण प्रणाली में डेटा को कितनी प्रभावी ढंग से लगातार फीड करती है।एक अच्छी तरह से डिज़ाइन की गई सेंसिंग प्रणाली यह सुनिश्चित करती है कि प्रत्येक गतिविधि की वास्तविक समय में निगरानी और समायोजन किया जाए।यह दृष्टिकोण रोबोटिक्स में व्यापक रूप से उपयोग किया जाता है क्योंकि यह सटीकता में सुधार करता है, विफलता के जोखिम को कम करता है, और अप्रत्याशित वातावरण में भी लगातार प्रदर्शन सुनिश्चित करता है।
रोबोट के घटकों के बीच संचार को कौन से कारक प्रभावित करते हैं?ह्यूमनॉइड रोबोट में, सेंसर, नियंत्रक और मोटर सिस्टम के बीच डेटा का लगातार आदान-प्रदान होता रहता है।भारी डेटा लोड के तहत भी यह संचार स्थिर रहना चाहिए, क्योंकि देरी, शोर या डेटा हानि सटीकता को कम कर सकती है और समग्र प्रदर्शन को प्रभावित कर सकती है।एक अच्छी तरह से डिज़ाइन की गई संचार प्रणाली विश्वसनीय डेटा ट्रांसफर सुनिश्चित करती है, जिससे रोबोट वास्तविक समय में सटीक और उत्तरदायी रहता है।
आधुनिक रोबोट इस संचार को संभालने के लिए कंट्रोलर एरिया नेटवर्क (CAN) प्रोटोकॉल पर भरोसा करते हैं।CAN महत्वपूर्ण संदेशों को प्राथमिकता देते हुए कई उपकरणों को एक ही नेटवर्क साझा करने की अनुमति देता है।इसके परिणामस्वरूप उपप्रणालियों के बीच कुशल समन्वय होता है और डेटा टकराव का जोखिम कम हो जाता है, विशेष रूप से जटिल मल्टी-एक्सिस रोबोटिक प्रणालियों में।

चित्र 6. आंतरिक प्रणालियों को जोड़ने और समन्वयित करने के लिए CAN संचार का उपयोग करने वाला औद्योगिक रोबोट
संचार स्थिरता एनएक्सपी टीजेए1050 जैसे ट्रांसीवर आईसी पर निर्भर करती है।यह हाई-स्पीड CAN ट्रांसीवर ISO 11898 मानक का अनुपालन करता है और 1 Mbit/s तक डेटा दरों का समर्थन करता है, जो इसे रोबोटिक्स और औद्योगिक प्रणालियों में वास्तविक समय संचार के लिए उपयुक्त बनाता है।यह आम तौर पर 5 वी आपूर्ति से संचालित होता है और टीएक्सडी और आरएक्सडी पिन के माध्यम से सीधे माइक्रोकंट्रोलर कैन नियंत्रकों के साथ इंटरफेस करता है।डिवाइस सिंगल-एंडेड लॉजिक सिग्नल को डिफरेंशियल CANH और CANL आउटपुट में परिवर्तित करता है, जो लंबे केबल रन पर शोर प्रतिरक्षा में काफी सुधार करता है।इसमें कम विद्युत चुम्बकीय उत्सर्जन (ईएमई), उच्च विद्युत चुम्बकीय प्रतिरक्षा (ईएमआई), थर्मल सुरक्षा और बस लाइनों पर शॉर्ट-सर्किट सुरक्षा भी शामिल है।
रोबोट सिस्टम स्केलेबिलिटी के बारे में क्या?यदि आप भविष्य में सिस्टम का विस्तार या अपग्रेड करने की योजना बना रहे हैं, तो CAN-आधारित संचार इसे आसान बनाता है क्योंकि पूरे सिस्टम को फिर से डिज़ाइन किए बिना उसी नेटवर्क में नए मॉड्यूल जोड़े जा सकते हैं।ऑटोमेशन लाइन या उन्नत रोबोटिक्स प्लेटफ़ॉर्म जैसे बढ़ते अनुप्रयोगों के लिए यह लचीलापन एक प्रमुख लाभ है।
उच्च-शक्ति वाले मोटर और तेज़-स्विचिंग सर्किट विद्युत शोर उत्पन्न करते हैं जो संवेदनशील नियंत्रण संकेतों में हस्तक्षेप कर सकते हैं।रोबोटिक प्रणालियों में, यह एक चुनौती पैदा करता है क्योंकि कम-वोल्टेज नियंत्रण सर्किट को उच्च-वोल्टेज पावर चरणों के साथ काम करना चाहिए।उचित सुरक्षा के बिना, हस्तक्षेप से अस्थिर संचालन, गलत सेंसर डेटा और सिस्टम की विश्वसनीयता कम हो सकती है।
तो, जब मोटरें पूर्ण लोड पर चल रही हों तो क्या रोबोट स्थिर रहेगा?क्या यह शोर वाले वातावरण में सटीक सेंसर रीडिंग बनाए रख सकता है?इसे संबोधित करने के लिए, आधुनिक रोबोट नियंत्रण और पावर अनुभागों को अलग करने के लिए डिजिटल अलगाव का उपयोग करते हैं।यह डेटा को सीधे विद्युत कनेक्शन के बिना सर्किट के बीच से गुजरने की अनुमति देता है, जिससे शोर और वोल्टेज स्पाइक्स को महत्वपूर्ण संकेतों को प्रभावित करने से प्रभावी ढंग से रोका जा सकता है।परिणामस्वरूप, सिस्टम विद्युत शोर वाले वातावरण में भी स्थिर संचालन और सटीक सेंसर रीडिंग बनाए रख सकता है।

चित्र 7.
ADUM1200
और
 ADUM1200
AD
Out Stock
ADUM1200
AD
Out Stock
ADUM1201
ADUM1201
DIGITAL
Out Stock
एनालॉग डिवाइसेस डेटाशीट के अनुसार, ADuM1200 और AduM1201 जैसे डिवाइस बिना किसी सीधे विद्युत कनेक्शन के आंतरिक चुंबकीय अलगाव बाधा में सिग्नल स्थानांतरित करके डिजिटल अलगाव प्रदान करते हैं।दोनों iCoupler® तकनीक पर आधारित दोहरे चैनल डिजिटल आइसोलेटर हैं, जो कम प्रसार विलंब और सख्त समय सटीकता बनाए रखते हुए 25 एमबीपीएस तक डेटा दर में सक्षम हैं।वे आम तौर पर 2.5 केवी आरएमएस (पैकेज प्रकार के आधार पर) तक के अलगाव वोल्टेज का समर्थन करते हैं, जो उन्हें उच्च-वोल्टेज पावर चरणों से कम-वोल्टेज नियंत्रण सर्किट को अलग करने के लिए उपयुक्त बनाता है।
ADuM1200 में दो फॉरवर्ड-दिशा चैनल हैं, जबकि ADuM1201 एक फॉरवर्ड और एक रिवर्स चैनल प्रदान करता है, जो नियंत्रण प्रणालियों में द्विदिश संचार की अनुमति देता है।ये उपकरण मानक आपूर्ति वोल्टेज (आमतौर पर 3.3 वी या 5 वी) से संचालित होते हैं और पारंपरिक ऑप्टोकॉप्लर्स की तुलना में अपेक्षाकृत कम बिजली की खपत करते हैं, जबकि एलईडी की अनुपस्थिति के कारण बेहतर विश्वसनीयता और लंबी उम्र भी प्रदान करते हैं।
सिग्नल की अखंडता को बनाए रखते हुए, अलगाव न केवल सिस्टम स्थिरता और सटीकता में सुधार करता है, बल्कि संवेदनशील सर्किट को विद्युत तनाव से भी बचाता है, विफलता के जोखिम को कम करता है और निरंतर औद्योगिक वातावरण में विश्वसनीय संचालन का समर्थन करता है।
टेस्ला ऑप्टिमस और अन्य एआई-संचालित प्लेटफ़ॉर्म सटीक निर्णय लेने के लिए कच्चे सेंसर सिग्नल को सटीक डिजिटल डेटा में कैसे परिवर्तित करते हैं?सेंसर उपयोग के लिए तैयार डिजिटल सिग्नल उत्पन्न नहीं करते हैं;इसके बजाय, वे छोटे एनालॉग वोल्टेज उत्पन्न करते हैं जो गति, बल या स्थिति का प्रतिनिधित्व करते हैं।ये सिग्नल अक्सर कमजोर होते हैं और शोर के प्रति संवेदनशील होते हैं, इसलिए नियंत्रण प्रणाली द्वारा इनका विश्वसनीय रूप से उपयोग करने से पहले इन्हें ठीक से वातानुकूलित किया जाना चाहिए।यदि इस प्रक्रिया को सही ढंग से नहीं संभाला जाता है, तो उन्नत AI सिस्टम भी सटीकता और स्थिरता के साथ संघर्ष कर सकते हैं।
प्रक्रिया सिग्नल कंडीशनिंग से शुरू होती है, जहां एनालॉग डिवाइस से AD8510 जैसे सटीक एम्पलीफायर एक भूमिका निभाते हैं।AD8510 एक कम शोर वाला, रेल-टू-रेल इनपुट/आउटपुट ऑप-एम्प है जो उच्च-सटीकता सिग्नल प्रोसेसिंग के लिए डिज़ाइन किया गया है, जिसमें इनपुट ऑफसेट वोल्टेज आमतौर पर 1 mV और कम बायस करंट होता है, जो इसे संवेदनशील सेंसर इंटरफेस के लिए उपयुक्त बनाता है।यह 2.7 वी से 5.5 वी की आपूर्ति रेंज पर काम करता है और लगभग 5 वी/µs की स्लू दर के साथ लगभग 8 मेगाहर्ट्ज का लाभ बैंडविड्थ उत्पाद प्रदान करता है, जो इसे विरूपण के बिना तेजी से बदलते एनालॉग सिग्नल को संभालने में सक्षम बनाता है।इसका कम कुल हार्मोनिक विरूपण (टीएचडी) और उच्च ओपन-लूप लाभ सिग्नल अखंडता सुनिश्चित करता है, जबकि शॉर्ट-सर्किट सुरक्षा और कैपेसिटिव लोड के साथ स्थिर संचालन जैसी विशेषताएं इसे वास्तविक सर्किट डिजाइनों में विश्वसनीय बनाती हैं।गतिशील वातावरण में, AD8338 जैसे अन्य घटकों का उपयोग परिवर्तनीय लाभ नियंत्रण के लिए भी किया जा सकता है।
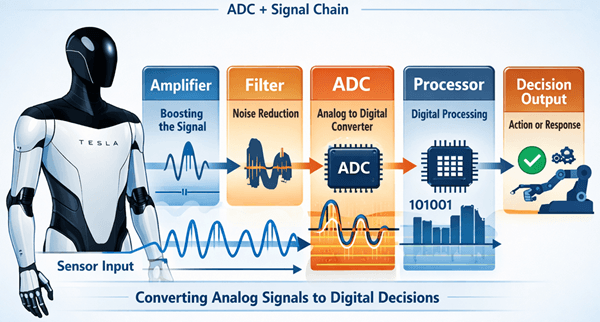
चित्र 8. ह्यूमनॉइड रोबोट में एनालॉग-टू-डिजिटल प्रोसेसिंग
एक बार वातानुकूलित होने के बाद, एनालॉग सिग्नल AD7616 जैसे उच्च-प्रदर्शन ADCs का उपयोग करके डिजिटल डेटा में परिवर्तित हो जाते हैं।यह डिवाइस एक 16-चैनल, एक साथ सैंपलिंग एनालॉग-टू-डिजिटल कनवर्टर है जिसमें वास्तविक 16-बिट रिज़ॉल्यूशन और 1 एमएसपीएस तक थ्रूपुट है, जो कई चैनलों पर सटीक और तेज़ डेटा अधिग्रहण की अनुमति देता है।यह एक एकीकृत एनालॉग फ्रंट एंड के साथ ±10 वी और ±5 वी इनपुट रेंज दोनों का समर्थन करता है, जिससे कई बाहरी घटकों की आवश्यकता समाप्त हो जाती है।AD7616 में लगभग 90 डीबी का उच्च सिग्नल-टू-शोर अनुपात (एसएनआर) और कम इंटीग्रल नॉनलाइनरिटी (आईएनएल) है, जो सटीक और दोहराए जाने योग्य माप सुनिश्चित करता है।इसमें लचीले सीरियल और समानांतर इंटरफेस (एसपीआई-संगत), ऑन-चिप संदर्भ विकल्प और कुशल चैनल स्कैनिंग के लिए सीक्वेंसर कार्यक्षमता भी शामिल है।
मल्टी-सेंसर रोबोटिक प्लेटफ़ॉर्म में, ADC प्रदर्शन सीधे निर्णय गुणवत्ता को प्रभावित करता है।एक साथ नमूनाकरण यह सुनिश्चित करता है कि एकाधिक सेंसर से डेटा समय-संरेखित रहता है, जिससे विसंगतियों को रोका जा सकता है जिससे गलत व्याख्या या विलंबित प्रतिक्रिया हो सकती है।उच्च-रिज़ॉल्यूशन रूपांतरण के साथ संयुक्त स्वच्छ प्रवर्धन नियंत्रण प्रणाली को सटीक वास्तविक दुनिया डेटा को संसाधित करने में सक्षम बनाता है।
यह चरण संवेदन और बुद्धिमत्ता के बीच सेतु का निर्माण करता है।सटीक सिग्नल कंडीशनिंग और विश्वसनीय एडीसी प्रदर्शन के साथ, रोबोटिक सिस्टम अपने वातावरण की सटीक व्याख्या कर सकते हैं और जटिल और तेजी से बदलती परिस्थितियों में भी सुचारू, स्थिर और समन्वित कार्यों के साथ प्रतिक्रिया कर सकते हैं।
आधुनिक रोबोट आईसी आर्किटेक्चर का उपयोग करते हैं क्योंकि रोबोट नियंत्रण कोई एकल कार्य नहीं है।सेंसिंग, सिग्नल रूपांतरण, निर्णय लेना, संचार और मोटर एक्चुएशन सभी लगातार और सही क्रम में चलने चाहिए।यदि इन कार्यों को स्पष्ट चरणों में विभाजित नहीं किया गया है, तो शोर, समय में देरी और सिग्नल टकराव गति सटीकता और सिस्टम स्थिरता को कम कर सकते हैं।
एक स्तरित इलेक्ट्रॉनिक आर्किटेक्चर इस वर्कफ़्लो को प्रबंधित करना आसान बनाता है।सेंसर वास्तविक दुनिया इनपुट प्रदान करते हैं, एडीसी और सिग्नल-चेन सर्किट प्रयोग करने योग्य डेटा तैयार करते हैं, माइक्रोकंट्रोलर प्रक्रिया नियंत्रण तर्क, मोटर ड्राइवर आंदोलन निष्पादित करते हैं, और कैन प्लस डिजिटल अलगाव मॉड्यूल के बीच विश्वसनीय डेटा स्थानांतरण बनाए रखने में मदद करते हैं।यह संरचना रोबोट के अंदर वास्तविक संचालन पथ से मेल खाती है, यही कारण है कि इसका व्यापक रूप से ह्यूमनॉइड, औद्योगिक और स्वायत्त रोबोटिक प्रणालियों में उपयोग किया जाता है।
एक ह्यूमनॉइड रोबोट तभी अच्छी तरह से चलता है जब उसके इलेक्ट्रॉनिक्स अलग-अलग हिस्सों के बजाय एक समन्वित श्रृंखला के रूप में काम करते हैं।व्यावहारिक डिज़ाइन में,
STM32F407VGT6
जैसे नियंत्रक तेजी से निर्णय लेने का काम संभालते हैं,
STM32F407VGT6
STMicroelectronics
IC MCU 32BIT 1MB FLASH 100LQFP
In Stock: 17180 pcs
A4988SETTR-T
या TLE9879 जैसे मोटर उपकरण कमांड को स्थिर गति में बदल देते हैं, और LSM6DSOX जैसे सेंसर संतुलन और सुधार के लिए आवश्यक वास्तविक समय गति डेटा प्रदान करते हैं।
A4988SETTR-T
Allegro MicroSystems
IC MTR DRVR BIPOLAR 3-5.5V 28QFN
In Stock: 96300 pcs
TJA1050
जैसे संचार उपकरण सबसिस्टम को सिंक्रनाइज़ रखते हैं, जबकि
TJA1050
NXP
TJA1050 NXP SOP
In Stock: 2440 pcs
ADUM1200
और
ADUM1200
AD
Out Stock
ADUM1201
जैसे आइसोलेटर शोर वाले बिजली वातावरण में सिग्नल सटीकता की रक्षा करने में मदद करते हैं।सिग्नल-कंडीशनिंग चरण और एडी7616 जैसे एडीसी फिर कमजोर एनालॉग इनपुट को नियंत्रण लूप के लिए प्रयोग करने योग्य डिजिटल जानकारी में परिवर्तित करते हैं।जब ये परतें समय, डेटा गुणवत्ता और प्रतिक्रिया में संरेखित रहती हैं, तो रोबोट सुचारू रूप से आगे बढ़ सकता है और विश्वसनीय रूप से प्रतिक्रिया कर सकता है।जब वे ऐसा नहीं करते हैं, तो उन्नत AI भी अस्थिर इलेक्ट्रॉनिक्स की भरपाई नहीं कर सकता है।
ADUM1201
DIGITAL
Out Stock
TDK InvenSense
IMU ACCEL/GYRO/TEMP I2C/SPI LGA
स्टॉक में: 20300pcs

Texas Instruments
IC XPND 400KHZ I2C SMBUS 16TSSOP
स्टॉक में: 53395pcs
NXP USA Inc.
IC MCU 32BIT 640KB FLSH 100HLQFP
स्टॉक में: 125060pcs
Analog Devices Inc.
ACCEL 2-16G I2C/SPI 14LGA
स्टॉक में: 41176pcs
Allegro MicroSystems
IC MTR DRVR BIPOLAR 3-5.5V 28QFN
स्टॉक में: 96300pcs
STMicroelectronics
IC MCU 32BIT 64KB FLASH 48LQFP
स्टॉक में: 35200pcs
STMicroelectronics
IC MCU 32BIT 1MB FLASH 100LQFP
स्टॉक में: 17180pcs
NXP
IC I/O EXPANDER I2C 8B 16TSSOP
स्टॉक में: 47995pcs
NXP
TJA1050 NXP SOP
स्टॉक में: 2440pcs
AD
उपलब्ध नहीं
DIGITAL
उपलब्ध नहीं
Apr 14
दृश्य: 520
Apr 13
दृश्य: 425
क्योंकि संतुलन और गति की गुणवत्ता पूर्ण बंद लूप-संवेदन, रूपांतरण, नियंत्रण, संचार और क्रियान्वयन पर निर्भर करती है-इसलिए किसी एक चरण में कमजोरी पूरे रोबोट को ख़राब कर सकती है।
क्योंकि स्थानीय संवेदन और गति कार्यों को उच्च-स्तरीय निर्णयों की तुलना में तेज़, सख्त समय की आवश्यकता होती है, इसलिए कार्यभार को विभाजित करने से बहु-संयुक्त प्रणालियों में विलंबता नियंत्रण, समन्वय और स्केलेबिलिटी में सुधार होता है।
क्योंकि स्थिर संतुलन न केवल सेंसर की गुणवत्ता पर निर्भर करता है, बल्कि अंशांकन, कम-विलंबता अपडेट, सिंक्रनाइज़ डेटा प्रवाह और नियंत्रण लूप के अंदर सही व्याख्या पर भी निर्भर करता है।
क्योंकि स्थिर गति पूर्वानुमेय सेंसिंग-टू-एक्चुएशन टाइमिंग पर निर्भर करती है, और असंगत देरी प्रोसेसर के तेज होने पर भी समन्वय को तोड़ सकती है।
क्योंकि अलगाव मोटर-साइड शोर और वोल्टेज ट्रांसिएंट को नियंत्रण और सेंसर सिग्नल को दूषित करने से रोकने में मदद करता है, जो सीधे समय सटीकता और गति स्थिरता को प्रभावित करता है।
Apr 16
दृश्य: 384
Apr 16
दृश्य: 319

Apr 16
दृश्य: 283

Apr 16
दृश्य: 246

Apr 15
दृश्य: 425

Apr 15
दृश्य: 396